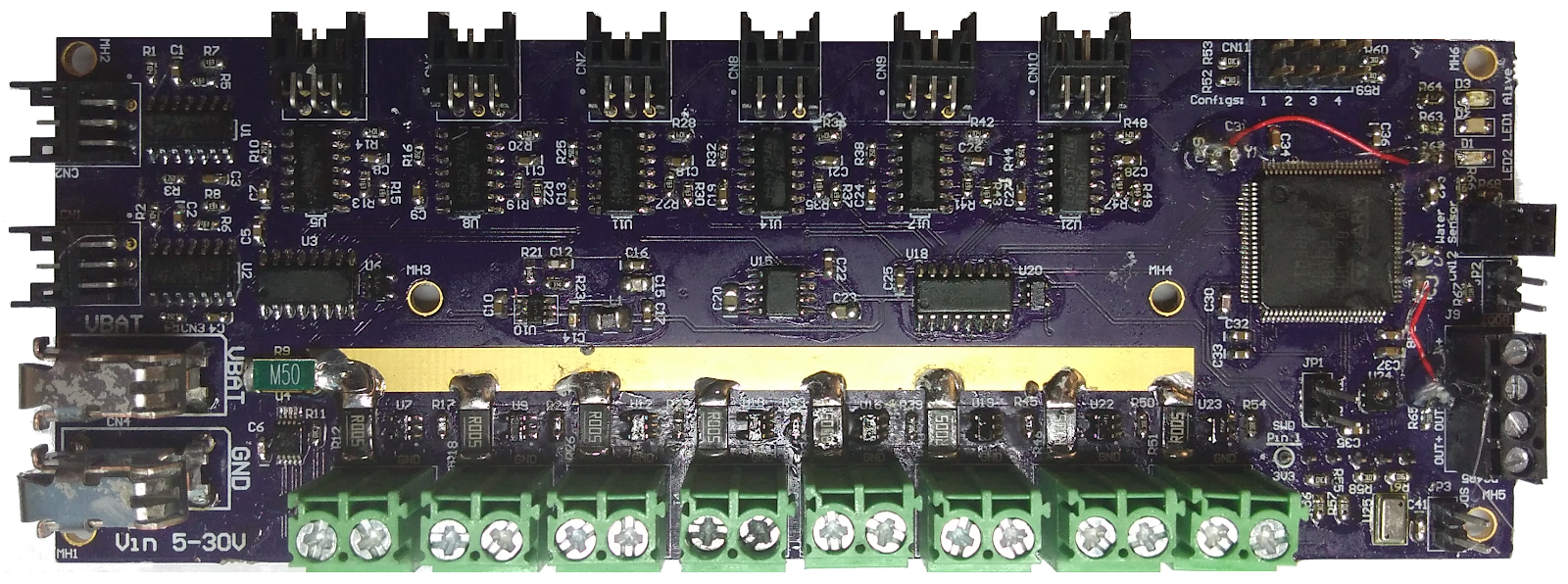
The previous motor controller could control up to three motors per PCB. Since Polaris utilizes 8 motors, this was enough reason to develop the second revision. This board can control up to 8 motors via PWM using their respective electronic speed controllers (ESC). The new configuration means the ESCs can be contained in the same enclosure as the PCB, reducing external wiring. The new revision allows the PCB to be used as a bus bar, eliminating the need for multiple high power lines to each motor. Connectors on the motor control board were made reversible, to prevent damage to the motors if the connector were connected in reverse. The system was upgraded from a F0 micro to a F4, which has a floating point unit for PID controls and may be implemented in the future.